2021-09-13
Class time
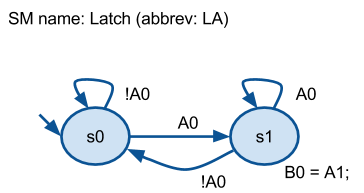
RIBS state machine coding style from Figure 3.4.1
#include "RIMS.h"
enum LA_States { LA_SMStart, LA_s0, LA_s1 } LA_State;
void TickFct_Latch()
{
switch(LA_State) { // Transitions
case LA_SMStart: // Initial transition
LA_State = LA_s0;
break;
case LA_s0:
if (!A0) {
LA_State = LA_s0;
}
else if (A0) {
LA_State = LA_s1;
}
break;
case LA_s1:
if (!A0) {
LA_State = LA_s0;
}
else if (A0) {
LA_State = LA_s1;
}
break;
default:
LA_State = LA_SMStart;
break;
} // Transitions
switch(LA_State) { // State actions
case LA_s0:
break;
case LA_s1:
B0 = A1;
break;
default:
break;
} // State actions
}
void main() {
B = 0x00; // Initialize outputs
LA_State = LA_SMStart; // Indicates initial call
while(1) {
TickFct_Latch();
}
}Observations:
All outputs are initialized to some intentional value. This requires thinking about the consequences of pins and configuration set to these values to avoid accidents.
? When does B0 change?
Does it change back to something else when exiting state s1?
The states are given symbol(ic value)s instead of integers directly, using an enum .
This allows the compiler to help find typos!
OPINION: reaching the default case should be an ERROR — always. Don’t care really means "didn’t check."
This will be a hard requirement for code in this course that is not in the zyBook.
The first switch happens before the second switch. So… when, exactly, does the outputs change in this system?
#include "RIMS.h"
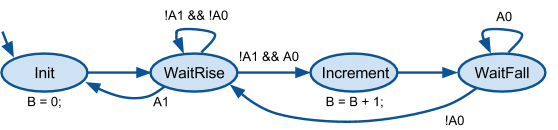
enum CR_States { CR_SMStart, CR_Init, CR_WaitRise, CR_Increment, CR_WaitFall } CR_State;
void TickFct_Carousel()
{
switch(CR_State) { // Transitions
case CR_SMStart: // Initial transition
CR_State = CR_Init;
break;
case CR_Init:
CR_State = CR_WaitRise;
break;
case CR_WaitRise:
if (A1) {
CR_State = CR_Init;
}
else if (!A1 && !A0) {
CR_State = CR_WaitRise;
}
else if (!A1 && A0) {
CR_State = CR_Increment;
}
break;
case CR_Increment:
CR_State = CR_WaitFall;
break;
case CR_WaitFall:
if (!A0) {
CR_State = CR_WaitRise;
}
else if (A0) {
CR_State = CR_WaitFall;
}
break;
default:
CR_State = CR_SMStart;
break;
} // Transitions
switch(CR_State) { // State actions
case CR_Init:
B = 0;
break;
case CR_WaitRise:
break;
case CR_Increment:
B = B + 1;
break;
case CR_WaitFall:
break;
default:
break;
} // State actions
}
void main() {
B = 0x00; // Initialize outputs
CR_State = CR_SMStart; // Indicates initial call
while(1) {
TickFct_Carousel();
}
}References
vocabulary in the article:
-
control inversion https://en.wikipedia.org/wiki/Inversion_of_control *