2021-10-20
1. Extra hardware
In addition to the initial kit of MCU devboards, you should also have the following parts readily available for course work:
-
SG90 servo (handed out on day19)
-
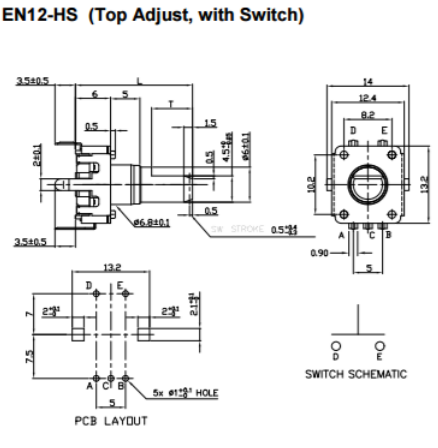
EN12-HS22AF20 rotary encoder + switch
-
HC-SR04 ultrasonic range finder module
-
(handed out later) ATtiny85 MCU
This hardware gives us a uniform set of input and output thingies to have a reason to use timers and interrupts and GPIO (Digital IO). … and the MSP430 Family Users Guide :)
2. Quadrature rotary encoder
-
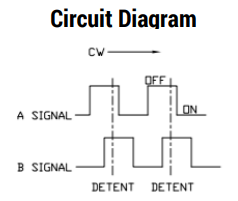
ON means a connection between A-C or B-C terminals.
-
Detent is the click resting position. Note that it’s possible to have the shaft position NOT in a detent — this is a potential source of problems in your code!
This construction then requires pull-up resistors on A and B up to the I/O supply voltage.
Check out the EN12 datasheet. Things that should (and will) terrify you:
-
sliding noise
-
contact bounce
Also be mindful of the contacts' max ratings: contact vs. switch. This lets you compute the smallest-value pull up resistor to be safe. (What is the largest safe value then??)
Example:
-
3.3V supply implies that Rpull-up ≥
-
5V supply? Rpull-up ≥ Which R value to use?
Quadrature (two signals orthogonal to each other, e.g. 90°) signals are best represented using a state machine.
-
Draw the state machine for the [A, B] values starting from one detent and rotated CW (clockwise) until the next detent.
Search The Ganssle Group for articles about encoders:
We are covering UARTs next, so for a good time, Ctrl-F for "warned" in this article and notice that interrupts are involved: http://www.ganssle.com/articles/aserial.htm